
当地时间11月28日,特斯拉公布了人形机器人新手臂的进展,手上增加至22个自由度,腕部/前臂有 3 个自由度。
灵巧手是特斯拉人形机器人最引人注目的环节之一,未来高自由度的灵巧手有望成为产业大趋势。
当前全球人形机器人产业主要技术进步主要观察特斯拉等海外巨头进展。
特斯拉人形机器人Optimus作为全球人形机器人产业的标杆,其产品路线的每一次技术迭代都值得重点关注。

01
人形机器人灵巧手概览
灵巧手是人形机器人抓取物体的重要工具,特斯拉Optimus灵巧手价值量占比量高达14%。灵巧手的技术路线和配置方案直接决定了机器人在实际操作过程中的表现。当前随着人形机器人加速商业化落地,各家人形机器人厂商对灵巧手的方案选择尤为关注。特斯拉 Optimus的技术方案有望成为各家厂商参考的首选。特斯拉人形机器人Optimus 的机械手部分经过了几代的更迭。从最开始初代的“6 主动 自由度 5 驱动自由度”,到 Gen2的11 主动自由度并增加指腹的触觉传感器。特斯拉此次更新的手臂22个自由度分别为5根手指单手指各4个自由度 腕部2个自动度,最大程度地模仿了人类手指最下方关节超过1自由度的结构,从而实现近乎于真人的手部动作。特斯拉表示,今年年底前的任务包括集成更广的触觉感应覆盖、更精细的肌腱控制,以及减轻前臂重量。根据行行查数据,2023年全球机器人灵巧手市场规模达15亿美元,2030年将突破30亿美元,CAGR约10.3%。
人形机器人灵巧手核心零部件
从结构来看,灵巧手的结构设计核心三要素是驱动、传动、传感。价值量最高的零部件为空心杯电机、丝杠、减速器、触觉传感器等环节。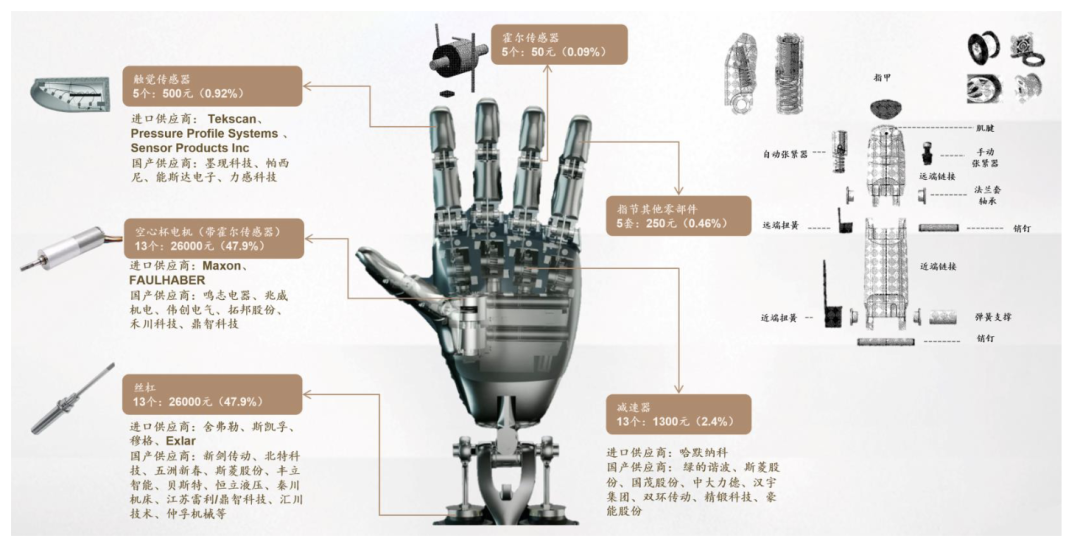 资料来源:公开整理
资料来源:公开整理
一、驱动环节
当前电机驱动是当前主流的灵巧手驱动方式,不同电机的重量会因功率、材料和尺寸的不同而有所不同。特斯拉第三代灵巧手由于相比于第二代的变化手部增加了自由 度,从而对应的电机数量将可能从原本的 6 个提升到 13-17 个;驱动器搭载位置从手掌改为手腕部位。空心杯电机是人形机器人占比较高的零部件环节。采用的是无铁芯转子,其电枢绕组为空心杯线圈,是一个空心的杯状结构。在原材料中,空心杯电机的永磁材料以高端钕铁硼(第三代稀土永磁)为主。由于人形机器人手指关节自由度提升,考虑到人形机器人的仿真性,其手指关节处需要配备体积小且能输出较大力的电机,空心杯电机具备较强契合度。空心杯电机核心技术壁垒包括线圈设计、绕线工艺以及绕线设备。竞争格局来看,海外品牌占据高端市场,国内产品性价比优势明显。全球空心杯电机CR5为67%,前五名企业包括 Faulhaber、Portescap、Allied Motion Technologies、Maxon Motor 及 Nidec Copal Corporation。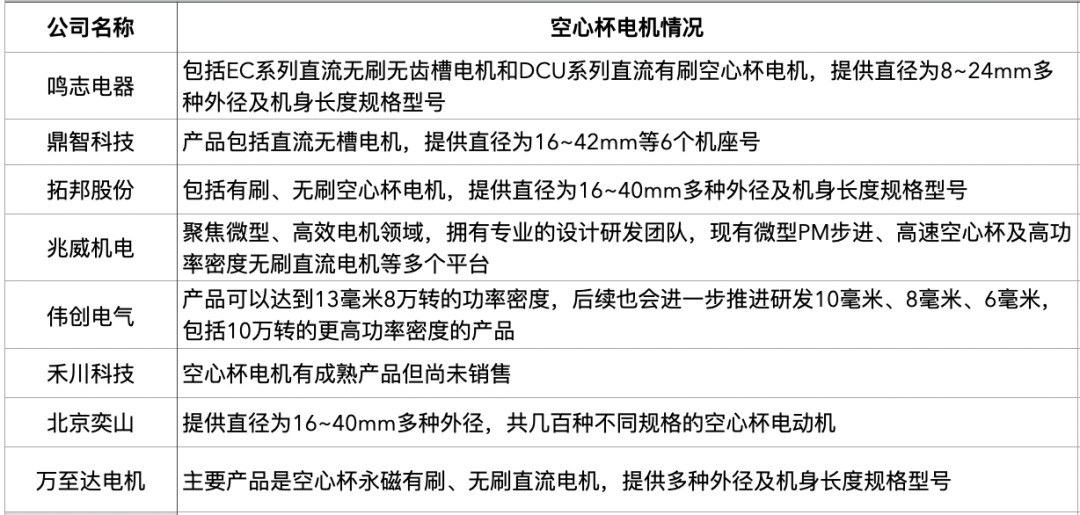 资料来源:公开资料整理
资料来源:公开资料整理
二、传动环节
传动上,腱绳 蜗轮蜗杆是特斯拉第一代方案,随着行业手部灵巧手丝杠的日渐成熟,叠加特斯拉提升单手承载力的需求,手部采用丝杠进行传动成为一种发展方向。
丝杠根据摩擦特性的不同,丝杠可以分为滑动丝杠、滚动丝杠以及静压丝杠三类。 国内丝杠厂商布局方面,新剑传动已建成国内首条行星滚柱丝杠产线;北特科技推进人形机器人丝杠产品的规模化产线建设;五洲新春以核心技术为关联,积极向机器人执行器核心零部件等方面转型,目前已完成了相关丝杠产品的持续送样和改进;贝斯特、恒立液压、新坐标、斯菱股份等在丝杠端也有所布局。国内行星滚柱丝杠已有一定产业基础,如南京工艺、博特精工、新剑智能等厂商已能够小规模生产行星滚柱丝杠。
国内丝杠厂商布局方面,新剑传动已建成国内首条行星滚柱丝杠产线;北特科技推进人形机器人丝杠产品的规模化产线建设;五洲新春以核心技术为关联,积极向机器人执行器核心零部件等方面转型,目前已完成了相关丝杠产品的持续送样和改进;贝斯特、恒立液压、新坐标、斯菱股份等在丝杠端也有所布局。国内行星滚柱丝杠已有一定产业基础,如南京工艺、博特精工、新剑智能等厂商已能够小规模生产行星滚柱丝杠。
减速器连接动力源(如电机)和执行机构(如机器人的关节),确保机器人能够在理想的速度范围内运行。在人形机器人的关节部位,如肘关节、腕关节等,减速器被广泛应用以实现精确的传动和控制。谐波减速器因其体积小、重量轻、传动比大等特点,常被用于这些需要精细操作的部位。但是由于谐波的价格偏贵,因此在大部分的厂商选型中,行星齿轮箱也有望成为谐波替代方案。全球市场格局方面,日系龙头哈默纳科垄断谐波减速器市场,全球份额超 80%。我国谐波减速器市场较为集中,前五大厂商出货量占比超六成。绿的谐波引领国产替代,来福谐波、同川科技、大族精密等企业也加快市场布局。全球精密行星减速器市场主要被少数几家企业所占据。德国企业处于领先地位,如纽卡特、威腾斯坦、赛威传动等,其他竞争力较强的还有日本企业,例如新宝、住友和电产等。国内行星减速器主要布局厂商有科峰智能、中大力德、新时达、宁波东力等。此外,RV减速器能够将电机的旋转运动转换成所需的速度和力矩,同时大幅减少运动中的误差,提高人形机器人的操作精度。RV减速器市场格局相对集中,两大龙头占据超过一半市场份额。2023 年全球龙头纳博特斯克和双环传动市场份额合计超过 60%。国产 RV 减速器已实现初步的国产替代,除双环传动外,珠海飞马、智同科技、中大力德、南通振康、秦川机床、六环传动等也是该领域具有实力的厂商。
三、传感环节
应用于灵巧手的传感器主要分为内部传感器和外部传感器。内部传感器主要反馈灵巧手的姿态信息,分为运动传感器和力/力矩传感器,可提供灵巧手的关节角度信息、位置信息和动态信息,对灵巧手的灵活、稳定抓取至关重要。外部传感器包括接近觉传感器和触觉传感器,主要感知目标物体的位置、受力等信息,这些信息对于提高灵巧手的操作成功率较为关键。灵巧的机器人手至少需要一组力和位置传感器,以实现自主操作和远程操作中的位置控制和阻抗控制等控制方案。
人形机器人的力觉主要有指、肢和关节等运动时机器人对受力的感知。六维力传感器是维度最高的力觉传感器,能够提供最高维度的力觉信息,并给出最为全面和精准的力觉数据。由于技术壁垒较高,具备批量化产品供应能力的厂商仍十分有限。六维力矩传感器品牌以欧美、日韩为主(ATI为行业龙头)。触觉传感器目前处于发展早期,以Canatu、Sensel、Flexpoint等海外企业为主。根据公开资料,国内布局触觉传感器的公司有苏州能斯达电子(汉威科技)、墨现科技、力感科技、瑞浒科技等、埔慧科技、帕西尼感知科技、韧和科技、他山科技、柔宇科技、宇博智能、常州福普生、上海澄科电子、常州柔希电子、柯力传感等。
03
人形机器人灵巧手市场格局
因时机器人是国内最早实现灵巧手商业化量产的企业,也是第一家把灵巧手价格降到万元水平的企业。其产品包括仿人五指灵巧手RH56BFX、RH56DFX和FTP系列,其中FTP系列工业级触觉感知仿人五指灵巧手可实时获取各个部位的触觉信息,有助于优化手指抓握动作,提高操作精细度。星动纪元推出了自主研发的灵巧手Xhand,具有12个主动自由度,采用全驱动方案,指尖还配置触觉传感器。灵七智能推出了国产首款量产高自由度五指灵巧手—DexHand021。该设备拥有19个自由度及23个高精度传感器,具备高可靠性与广泛的兼容性,能够高效实现人手33项功能动作中的32项。傲意科技灵巧手ROHand是模拟人体手部运动的高灵敏度末端执行装置,由手掌、手腕、五个手指、电机、传动部件等部分组成。五个手指可以单独运动,在外部命令下可以做出不同的动作。帕西尼感知科技灵巧手产品DexH13 GEN2是市场上首款融合多维触觉与AI视觉双模态能力的四指仿生灵巧手。双手搭载世界上最多的1956颗专业级ITPU多维触觉传感器,并带来惊人的7824路触觉信号解析能力。兆威机电推出手指集成驱动的高可靠灵巧手产品。整手通过兆威机电独创的关节全集成动力模 组及仿生学原理设计,配备17个主动执行单元,其中单指节拥有3个及以上主动执行单元,精准模拟人手部的抓握等精细动作,赋予机械手更好的灵活性与精确度。此外,兆威机电与中国科学院深圳先进技术研究院达成深度合作,双方成立了“灵巧手智能系统联合实验室”,专注于具备自主学习能力的灵巧手智能系统研发。整体而言,灵巧手往更高自由度、高感知能力和低成本提升的方向发展乃是大势所趋。未来在医疗、制造业、家庭服务等领域的应用前景广阔。




 VIP复盘网
VIP复盘网
